Posts by Collection
artifacts
projects
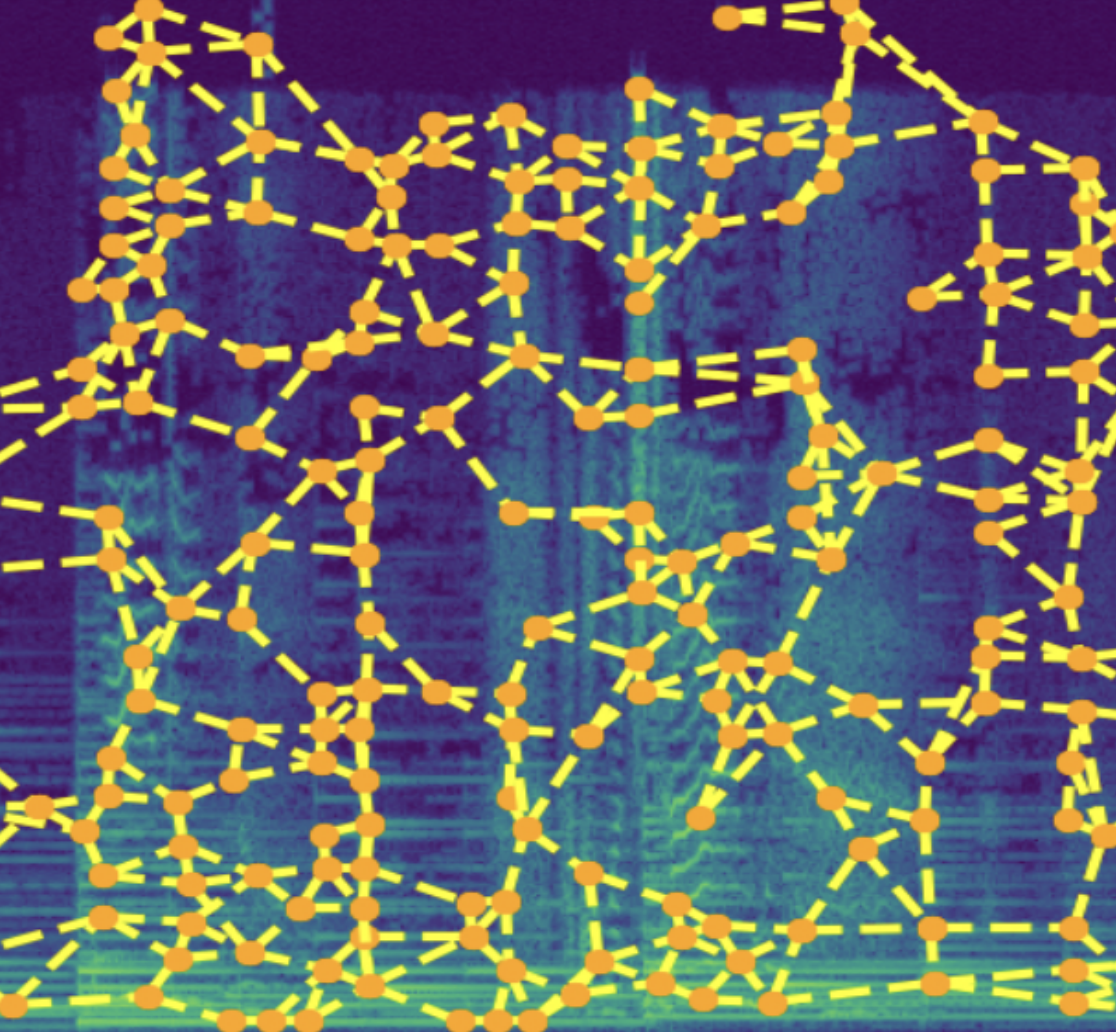
An Analysis of Audio Fingerprint Complexity for Music Identification
Music identification software has grown in popularity since the turn of the century, most notably with the release of Shazam and SoundHound. This technology is still incredibly relevant today, as Shazam was acquired by Apple in 2018. The general concept behind music identification is fairly straightforward: a user queries a… Read more
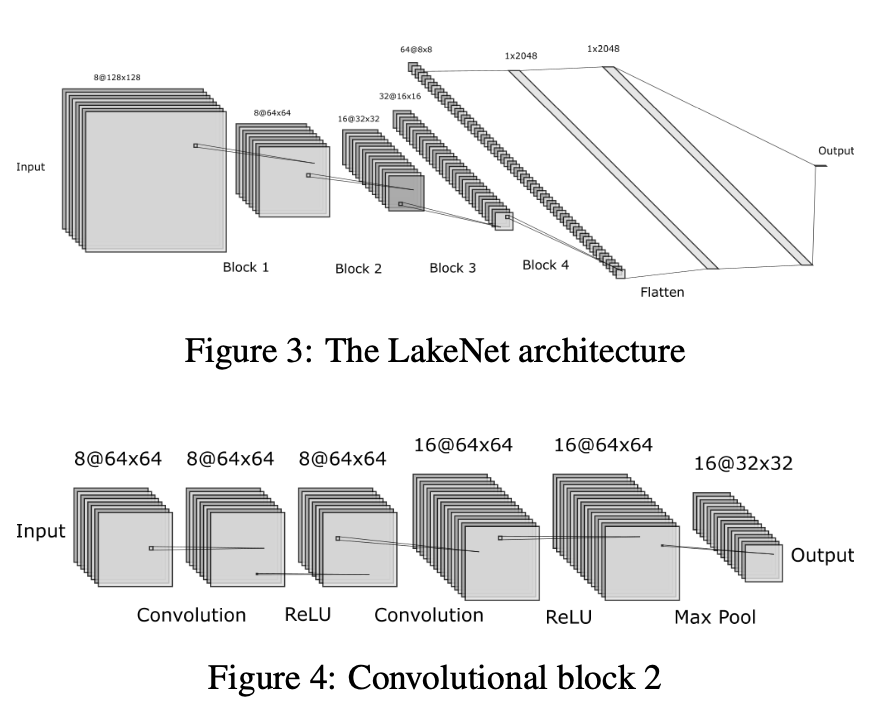
LakeNet: Water Quality Monitoring with Satellite Images and CNNs
Monitoring the water quality of lakes is a challenging task that can provide significant benefits and insights to environmental conservationists, policy-makers, and educators alike. While current methods utilize in-situ measurements to project water quality parameters, such methods are expensive and time consuming. This project proposes a Convolutional Neural Network regressor… Read more
Download: [Paper]
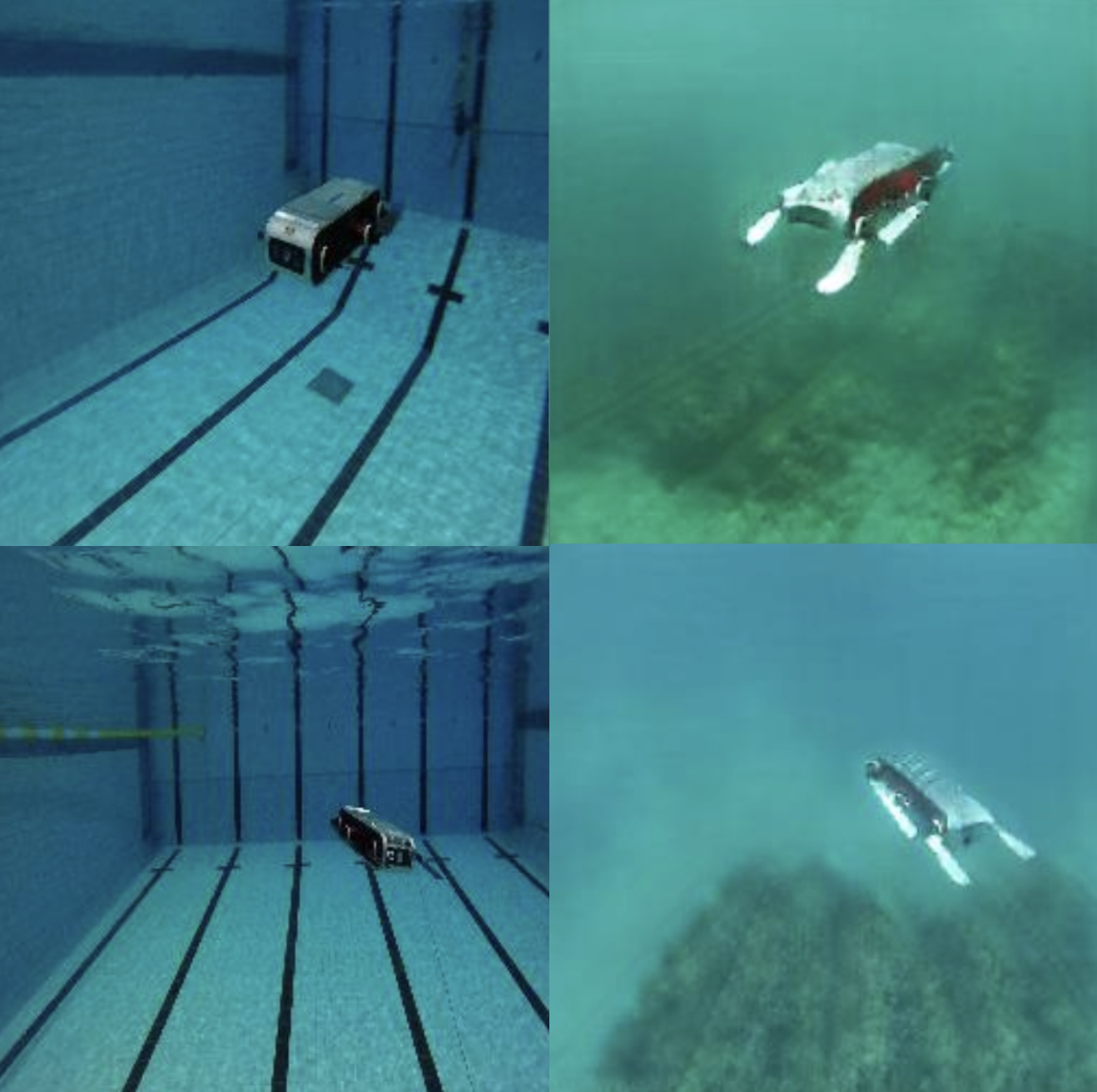
Pool2Ocean: Synthetic Data Generation for Underwater Object Detection Using CycleGAN
In recent years, Autonomous Underwater Vehicles (AUVs) have been in the forefront of oceanic research and exploration. Since some of these AUVs depend on visual input to move, interact with the environment, and communicate, it is important for them to make accurate generalizations about their visual observations. To better equip… Read more
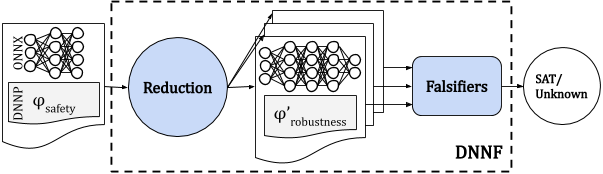
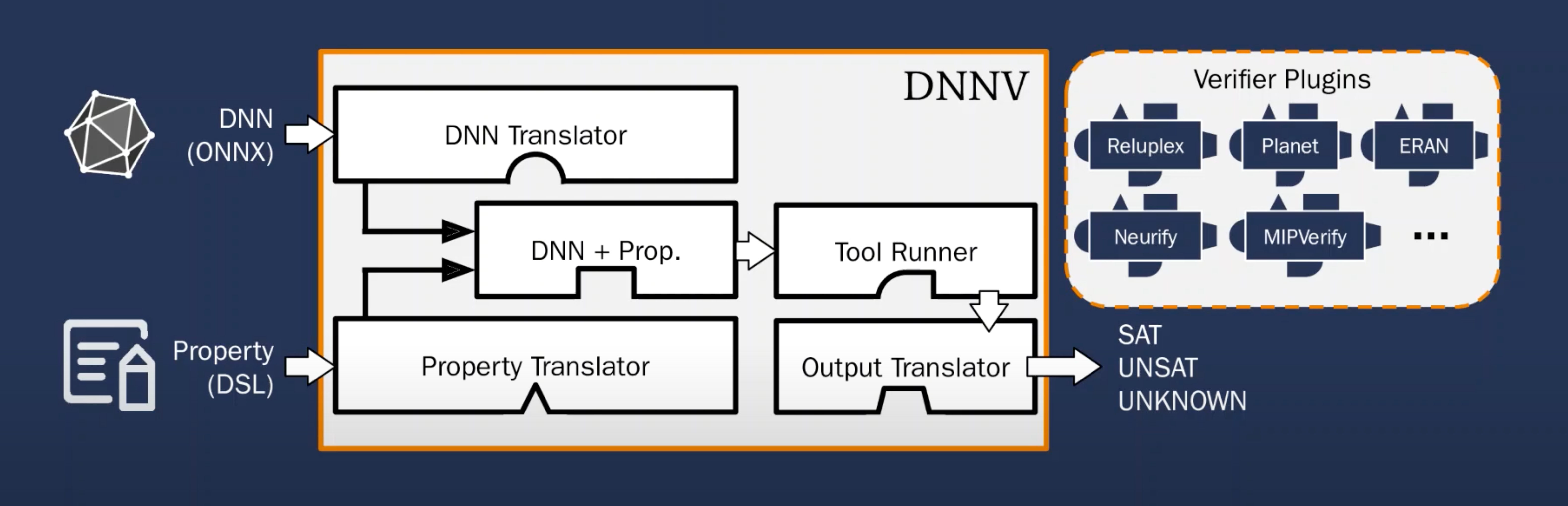
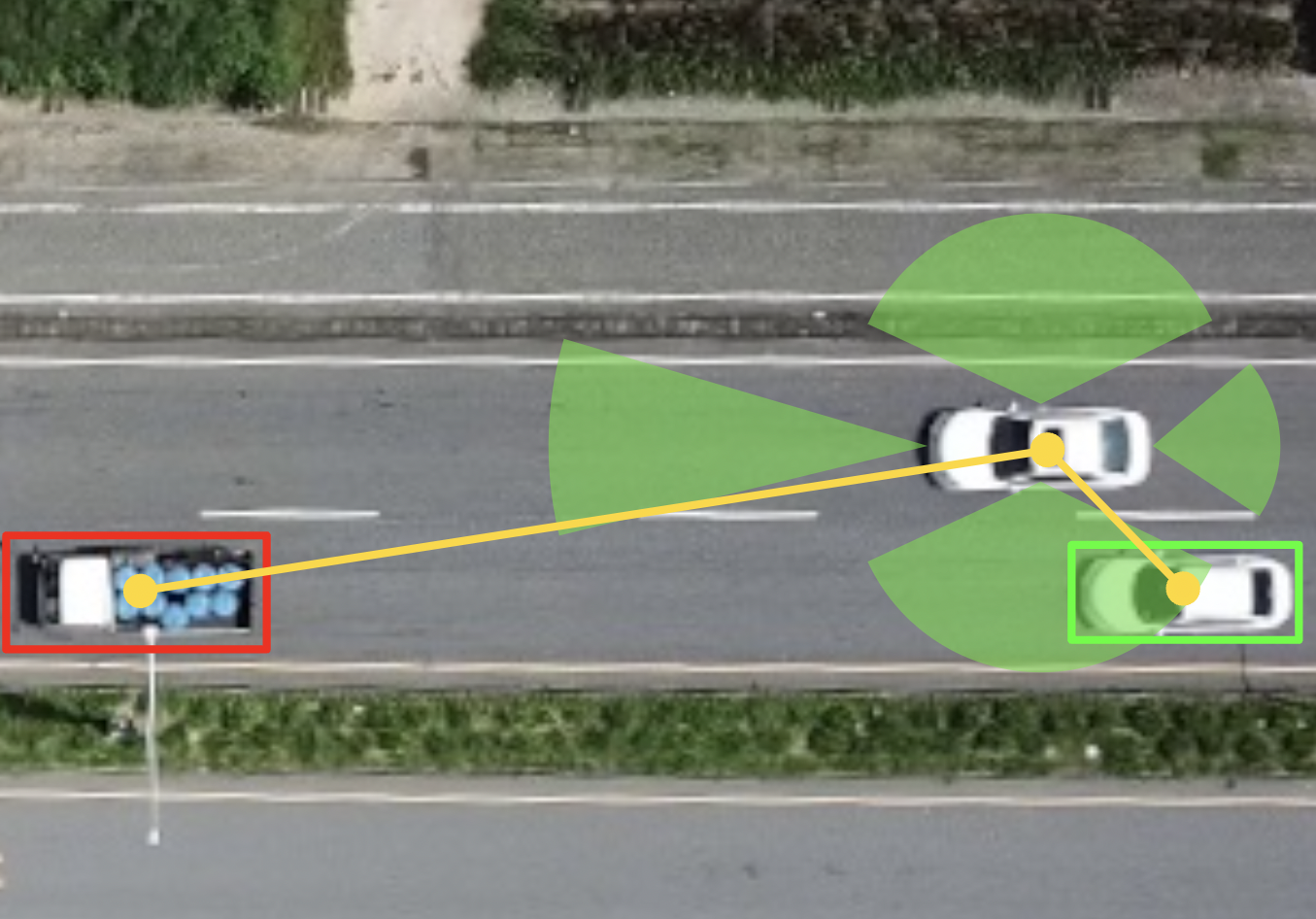
VAE-Guided Testing Framework for OpenPilot’s Vision Model
The control of autonomous driving systems is largely based on their visual predictions. However, due to the uncertainty and complexity of real-world driving environments, these systems will need to safely handle unfamiliar inputs. Otherwise, a misinterpretation of these inputs can lead to costly real-world misbehaviors. We examine the vision model… Read more
publications

Semantic Segmentation of Underwater Imagery: Dataset and Benchmark
Md Jahidul Islam, Chelsey Edge, Yuyang Xiao, Peigen Luo, Muntaqim Mehtaz, Christopher Morse, Sadman Sakib Enan, Junaed SattarIn this paper, we present the first large-scale dataset for semantic Segmentation of Underwater IMagery (SUIM). It contains over 1500 images with pixel annotations for eight object categories: fish (vertebrates), reefs (invertebrates), aquatic plants, wrecks/ruins, human divers, robots, and sea-floor. The images have been rigorously collected during oceanic explorations and… Read more
A Framework for the Unsupervised Inference of Relations Between Sensed Object Spatial Distributions and Robot Behaviors
Christopher Morse, Lu Feng, Matthew Dwyer, Sebastian ElbaumThe spatial distribution of sensed objects strongly influences the behavior of mobile robots. Yet, as robots evolve in complexity to operate in increasingly rich environments, it becomes much more difficult specify the underlying relations between spatial object distributions and robot behavior. We aim to address this challenge by leveraging system… Read more